Assistance : 01 53 31 36 25
Assistance : 01 53 31 36 25


Au travers de notre expérience en tant que modélisateur BIM, nous vous proposons dans cet article un regard croisé avec un expert de la scannérisation 3D. Un scan 3D est-il déjà un fichier BIM ? La confusion persiste… nous vous proposons au travers de cette lecture, de suivre une méthodologie éprouvée accompagnée de trucs et astuces qui nous l’espérons vous apporteront des éclaircissements sur ce domaine.
Organisation du Scan to BIM
Victor HUNOU – Ingénieur Bâtiment et Numérisation 3D chez ABD Ingénierie et TOPO Ingénierie, nous explique en quelques lignes les fondamentaux de l’acquisition de données, tandis que Pierre FERNANDEZ – Modélisateur Archicad spécialiste BIM chez BIM Services, nous partage sa méthode de production de la maquette numérique à partir d’un fichier scan 3D.
Le scan
Les relevés de bâtiment ont généralement pour vocation de permettre la constitution d’une base solide d’éléments graphiques et numériques à tous les intervenants d’un chantier de réhabilitation ou de gestion/maintenance d’un ouvrage existant. La plupart du temps, ces représentations graphiques ou numériques sont antérieures à la construction de l’ouvrage et décrivent un état « tel que conçu ». L’enjeu, dans la mesure des données géométriques et sémantiques des bâtiments est d’obtenir une représentation dans un état postérieur à sa construction, c’est-à-dire « tel que construit ».
Dès lors, deux méthodologies de relevés se croisent, en étant tout du moins complémentaires :
La méthode dite « traditionnelle » à l’aide d’outils tels que les mètres ruban, laser-mètre, tachéomètre etc… Cette méthode a l’avantage d’être relativement fiable, rapide et offre la possibilité de mesurer essentiellement les données nécessaires aux études. Cependant il existe un risque non négligeable d’oubli, d’erreur du fait d’approximations ou d’imprécisions dues aux caractéristiques des outils employés.
La numérisation 3D consiste à virtualiser un espace réel sous la forme de données numériques tridimensionnelles à des fins d’exploitation informatique. Elle repose sur deux technologies complémentaires que sont la technologie Lidar et la Photogrammétrie. Les matériels de numérisation 3D généralement utilisés dans le secteur de la construction sont les scanners 3D, les drones et les appareils photos numériques.
Les avantages de cette méthode sont la rapidité sans commune mesure d’acquisition de la donnée, la précision et l’exhaustivité des informations géométriques captées. Les inconvénients qui peuvent survenir résident dans les prix prohibitifs des matériels susmentionnés, le poids important des données capturées et dans les difficultés à numériser des éléments de détails ou espaces inaccessibles. C’est sur ce dernier point que les relevés traditionnels viennent compléter la numérisation 3D.
La numérisation 3D
Depuis sa position sur le terrain, le scanner pivote sur deux axes, l’un horizontal et l’autre vertical, pour couvrir toute la scène dans une sphère 360° et sur un rayon d’environ 150 mètres.
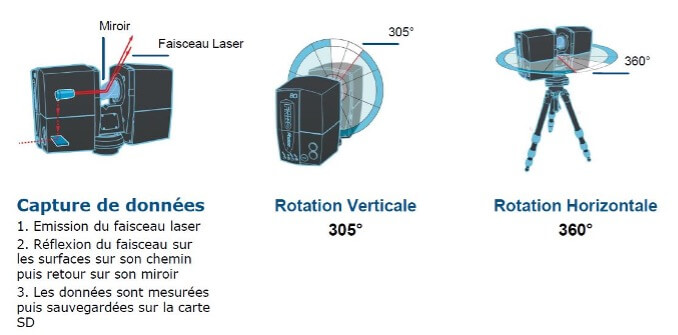
Source : documentation FARO
La réflexion des ondes permet de récupérer les coordonnées X, Y et Z relatives ayant pour origine le centre du miroir. L’onde réfléchie est mesurée en intensité dépendant notamment des matériaux et de la structure de l’atmosphère traversée. Une donnée de couleur peut être adjointe à chaque point (généralement une valeur de 0 à 255 pour chaque composante : Rouge, Vert, Bleu – RVB ou RGB en anglais). Bien que d’autres données puissent être collectées au sein du fichier, les données géométriques et colorimétriques représentent l’intérêt principal pour la majorité des études.
Pour un scan, la résolution va de 1 point tous les 5 cm à 1 point tous les 1,5 mm, en fonction de la configuration utilisée, avec une précision géométrique de 1 mm pour 25 m (erreur commise sur le placement du point). La résolution choisie sur site dépendra des zones d’intérêts à relever.
Après les réglages et le positionnement d’une station de référence, le scanner est positionné dans tous les points d’intérêt du projet pour capturer numériquement les informations.
La multiplication des stations de scans autour d’un même sujet augmente d’autant le nombre de points représentant la scène à numériser.
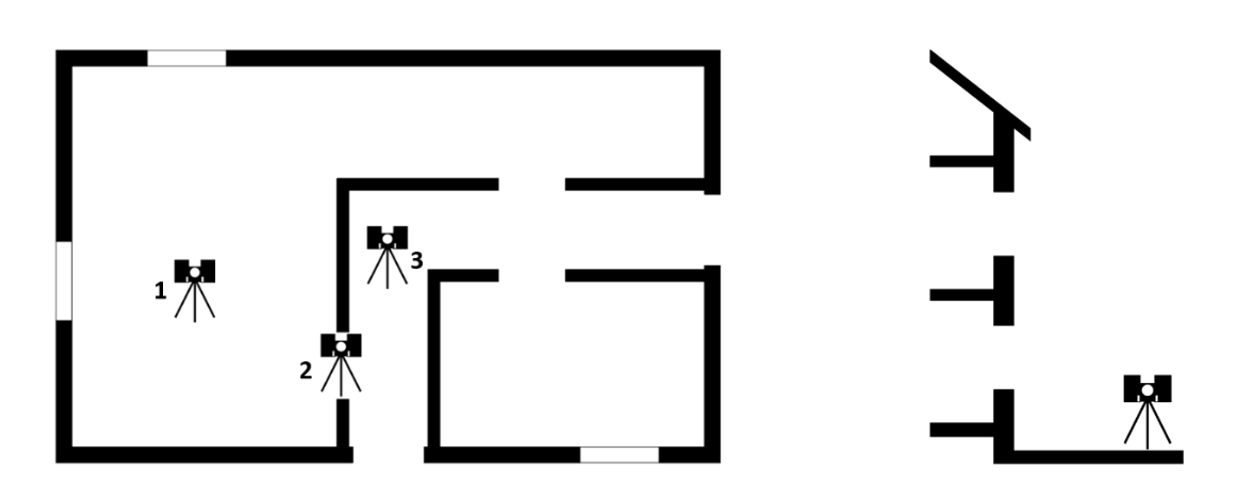
Figure 1 : Exemple cheminement de scans en vue en plan et coupe façade
Le nuage de point
Le format de données résultant de la numérisation 3D d’un espace par lasergrammétrie est le nuage de points (ou « pointclouds » en anglais).
La réalisation de scans à emplacements distincts dans le bâtiment permet d’obtenir une série de nuage de points isolés avec leur propre système de référence. Le nuage de points global est obtenu par assemblage de ces sous-éléments, autrement dit l’attribution d’un seul système de coordonnées aux nuages de points issus des stations de scan.
Les données brutes issues du scanner contiennent des informations dimensionnelles, d’intensités lumineuses mais aussi de GPS, de boussole, et d’inclinaison. Géométriquement, chaque point recueilli est défini par une distance, un angle vertical et un angle horizontal exprimés sur la base de l’origine du scanner. Le nuage de points « global » de la scène n’est obtenu qu’après assemblage de ces nuages de points individuels.
Ces données sont assemblées numériquement grâce aux logiciels informatiques de manière :
- Automatique par reconnaissance de plans et cibles de référence
- Semi-automatique par mise en correspondance des zones de chevauchement entre stations de scan
- Manuel par identification de points de références communes entre stations de scan
Les données photos issues des clichés capturés par le scanner peuvent être récupérées au format JPEG.

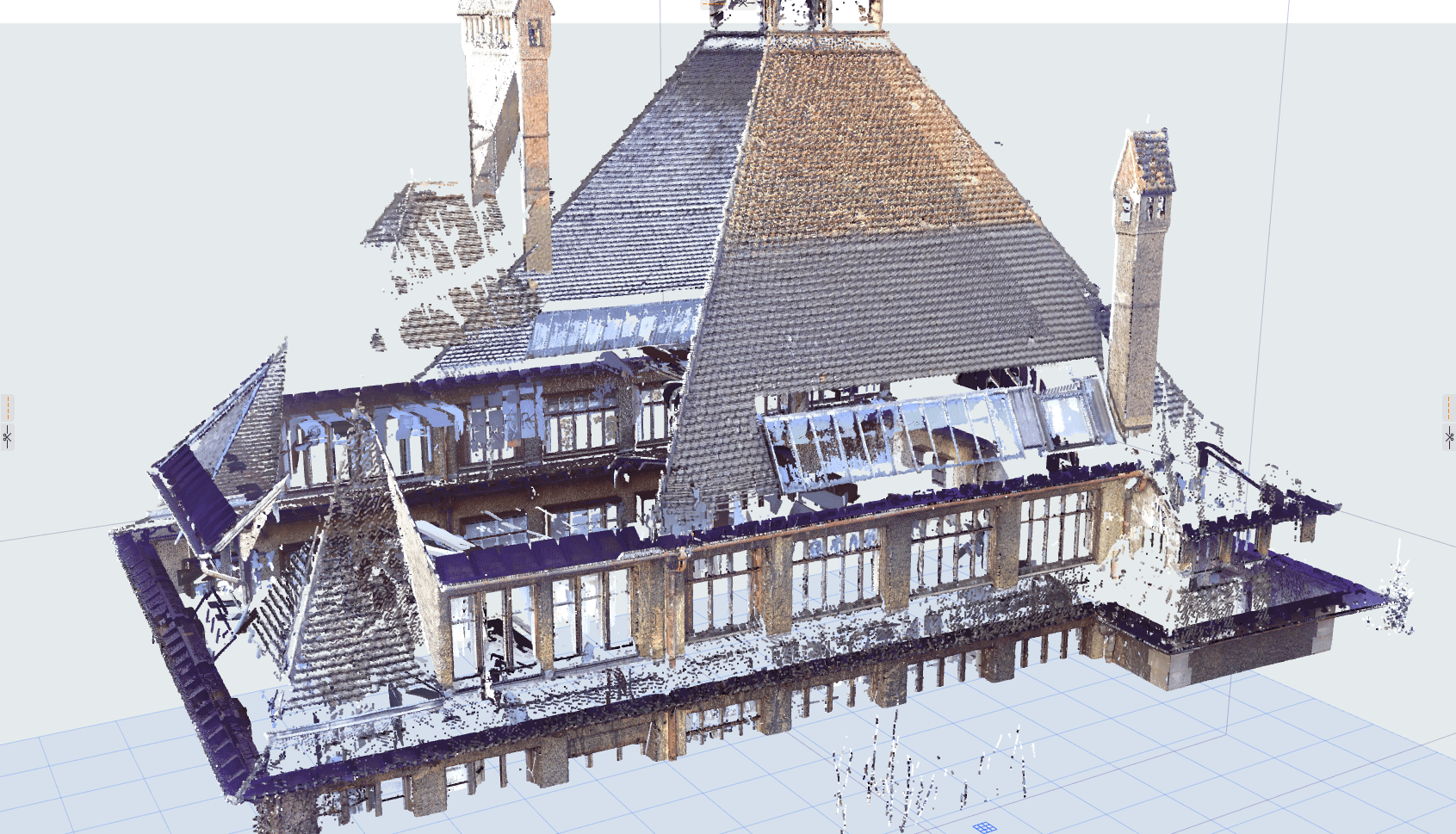
Figure 2 : Exemple de nuage de points
Assemblage des stations de scan
L’assemblage des stations se fait soit par ajout de références artificielles dans la scène scannée (figure2), soit en utilisant des éléments géométriques présents dans les zones de chevauchement entre deux scans (figure3). Les références sont des sphères ou des damiers. Ces dernières sont laissées sur le terrain entre deux stations de scan successives. Nous construisons ainsi de proche en proche un parcours lié par l’architecture de ces références.
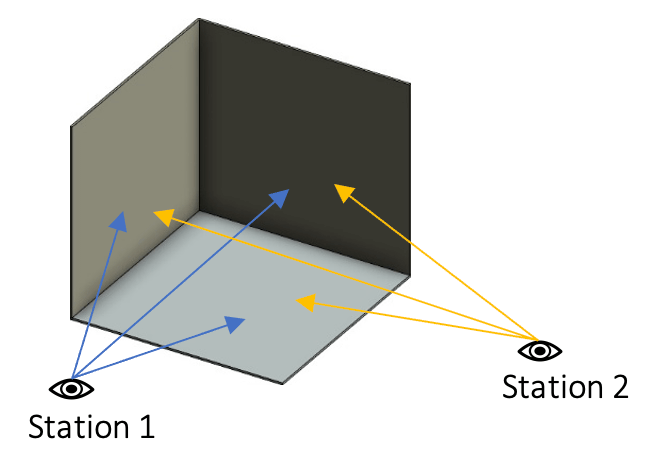
Figure 3 : Assemblage par plans
Les références artificielles peuvent être des sphères à diamètre standardisé fixées sur trépieds individuels ou des cibles à damier cartonnées fixés aux parois. Si une règle de trois cibles en commun entre chaque station doit être strictement respectée, celle-ci ne doit cependant pas prévaloir sur la qualité et l’exhaustivité du relevé de l’environnement que l’on cherche à mesurer.
Les deux méthodes peuvent être employées sur site pour garantir un meilleur assemblage.
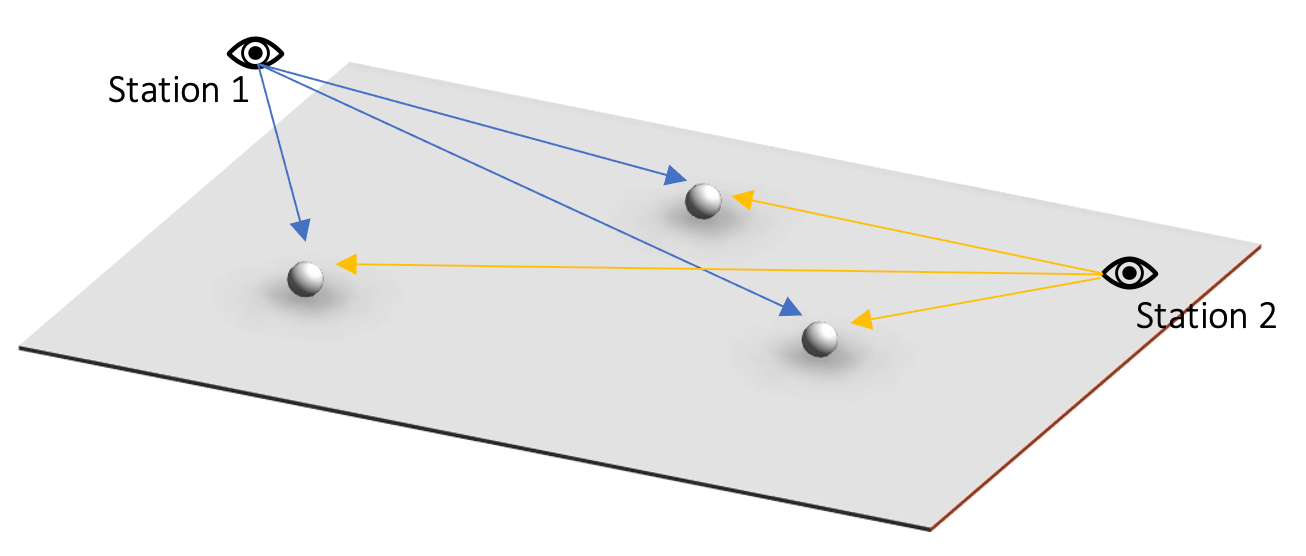
Figure 4 : Assemblage par références externes
Une évaluation rigoureuse de la qualité des données assemblées est un gage de qualité. Il s’effectue grâce aux outils proposés par les logiciels d’assemblage, de manière visuelle et selon plusieurs critères :
- Taux de recouvrement: Proportion des points en communs entre deux nuages de points. Plus le taux de recouvrement est élevé, plus la qualité de l’assemblage automatique sera renforcée, mais plus longue sera l’acquisition et plus lourdes seront les données.
- Qualité et risque d’erreur de glissement: Répartition des points communs sur différents plans permettant de stabiliser la scène. Les sphères et damiers servent à préciser cet indicateur en apportant des références supplémentaires et réduire le risque de glissement.
- Erreur RMS (Root Main Square): Données statistiques permettant d’évaluer la variance d’une série de données, désignant en quelque sorte l’erreur moyenne d’un groupe de données au regard de la distribution globale de ces dernières. De manière plus simplifiée, il s’agit d’une évaluation de l’écart-type des nuages de points isolés au vu de l’assemblage global proposé par le logiciel.
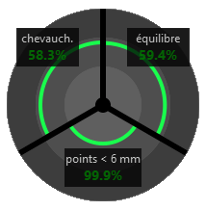
Figure 5 : Exemple appréciation graphique d'assemblage sur le logiciel RECAP Pro
L’analyse de ces critères précède une analyse empirique de la qualité d’assemblage par une appréciation visuelle des recouvrements des stations de scan. Elle se fait par identification de zones et d’éléments caractéristiques (murs béton, poteaux, gaines…) et par contrôle de leur géométrie décrite par le nuage de points. Une colorisation des points par station de scan permet par exemple de déterminer les stations à repositionner.

Figure 6 : Appréciation visuelle de la qualité d'assemblage
Nettoyage, échantillonnage et segmentation
Une fois les nuages de points constitués et vérifiés, un travail de nettoyage des points aberrants (bruit, passage…) peut être effectué afin d’améliorer la visibilité des données capturées. À la suite d’opérations de segmentation par entité d’intérêt et par suppression éventuelle d’éléments inutiles, chaque nuage de points peut faire l’objet d’un échantillonnage spatial (selon impératifs de modélisation) en vue d’harmoniser les données issues des campagnes de relevé.
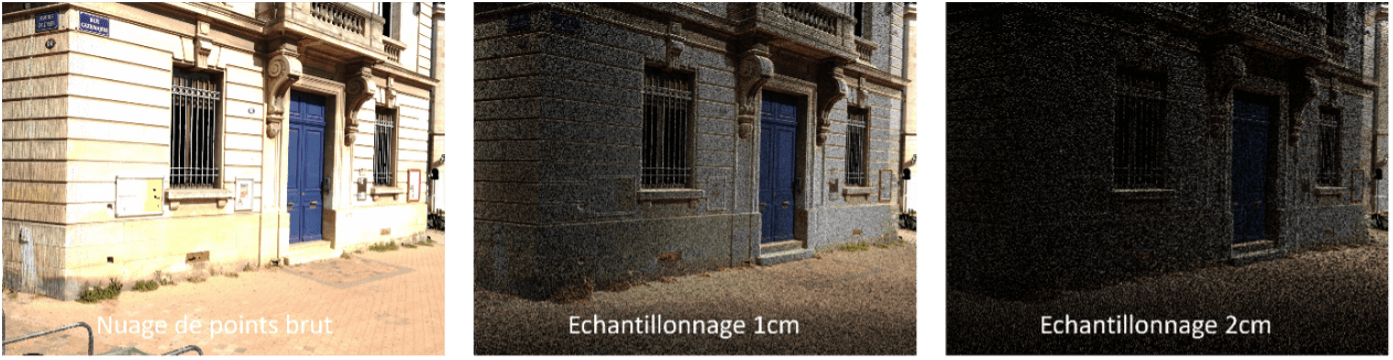
Figure 7 : Exemple d'échantillonage spatial
L’échantillonnage est un excellent moyen pour maitriser le poids des données qui seront interprétées dans les logiciels de conception.
Le nuage de points constitué est produit au format de l’éditeur logiciel (Autodesk RECAP, Trimble, FARO etc…), et peut également être exporté au format universel .e57 qui peut être lu par tout logiciel métier intégrant des nuages de points, limitant ainsi le risque de voir apparaître des problèmes d’interopérabilité entre les acteurs du chantier.
Limites des technologies d’acquisition numérique
Conditions climatiques défavorables
Même si certains matériels modernes de mesures Lidar peuvent évoluer en conditions climatiques défavorables (pluie, neige, brouillard…) du fait de leur caractéristiques techniques, il reste important de noter que la qualité des mesures peut être largement compromise. Les impulsions laser peuvent être réfléchies sur de la poussière ou des flocons de neige, ou bien déviées par diffraction au travers de gouttes d’eau de pluie, conduisant de fait à une remise en cause des données mesurées par :
- Absence des données obstruées
- Pollution du nuage de points par des données parasites
- Augmentation du phénomène de bruit (épaisseur des surfaces plan) liée à la perte de précision à cause de la diffraction.
En conclusion sur ce point, il est déconseillé d’utiliser le scanner 3D dans de telles conditions.
Surfaces réfléchissantes
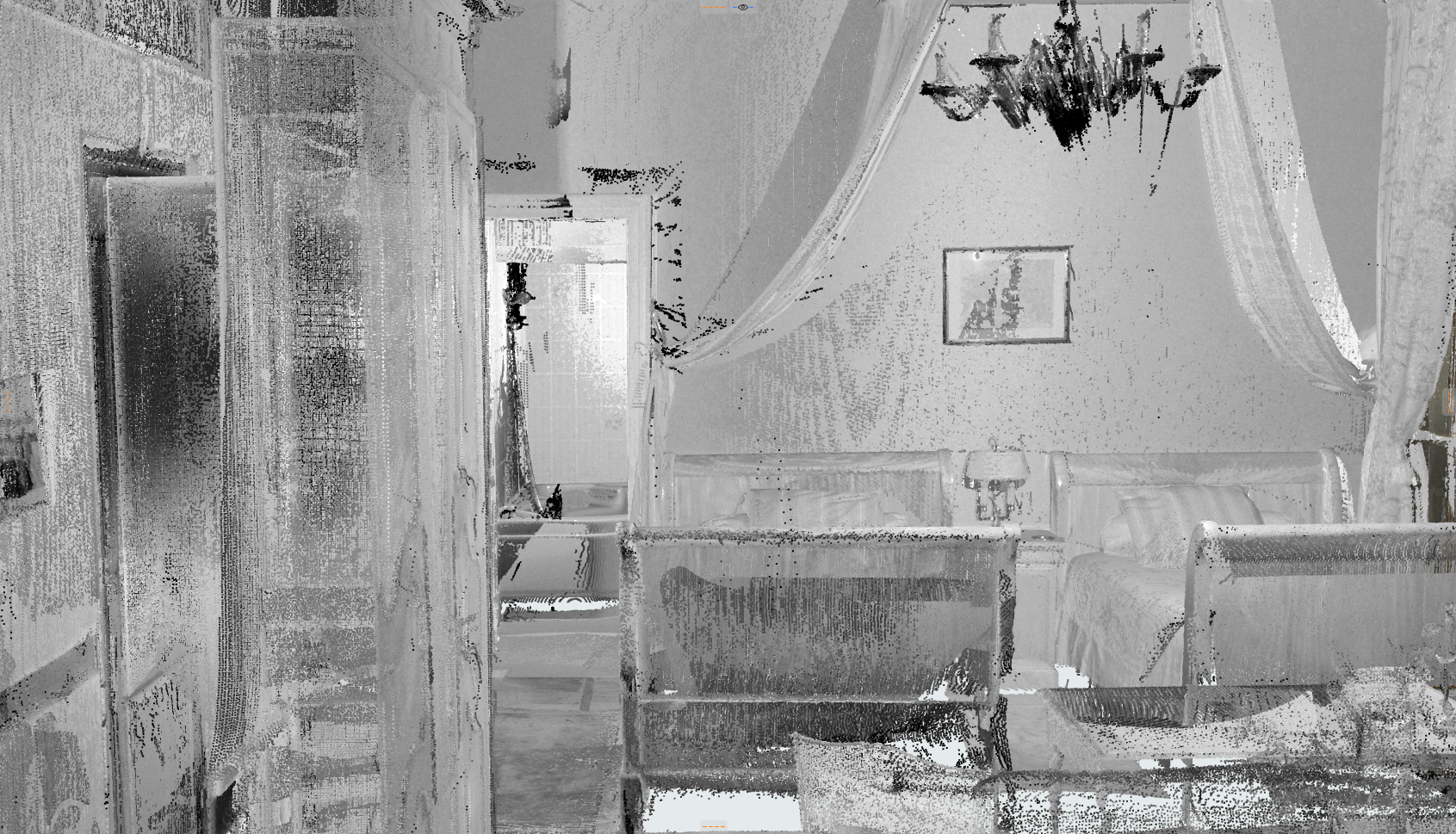
Les surfaces réfléchissantes constituent également un problème à cause du phénomène de réflexion diffuse. Si le scanner laser tire son épingle du jeu (par rapport à la photogrammétrie) sur certaines surfaces semi-réfléchissantes telles que des bardages métalliques, sols ou gaines techniques métalliques, les surfaces tels que les miroirs, les surfaces brillantes noirs et l’eau vont causer une altération totale des données.
Sur ces dernières, le faisceau laser va subir une diffraction, autrement dit une déviation du signal et par conséquent une interprétation erronée de la distance séparant le scanner du point impacté. L’exemple le plus illustratif est celui du miroir :
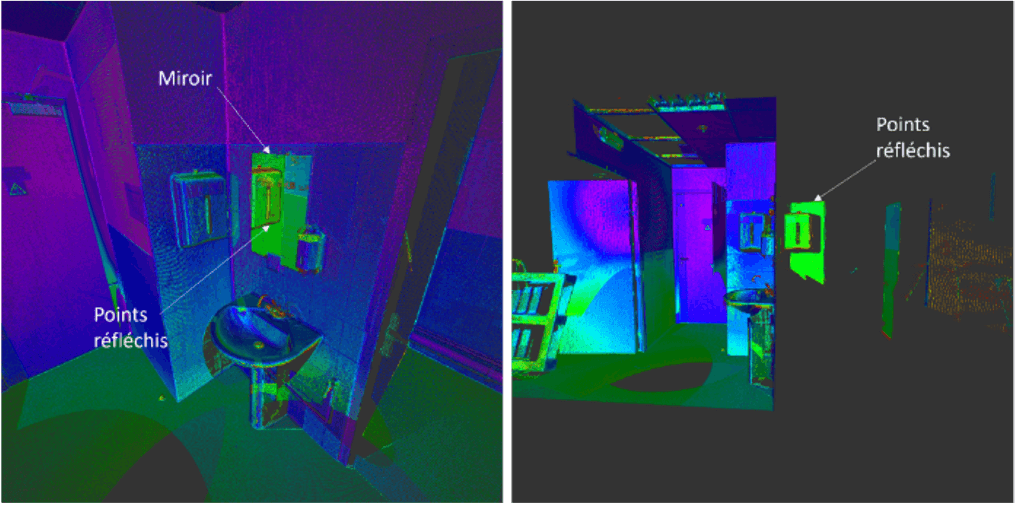
Figure 8 : Exemple de situation de scan "défavorable"
Dans ce nuage de points, les éléments réfléchis par le miroir sont dupliqués de l’autre côté du miroir car le scanner 3D ne « comprend pas » les reflets et considère les données comme de la « profondeur ». Une attention particulière doit être portée au nettoyage du nuage de points pour éviter les erreurs d’interprétation.
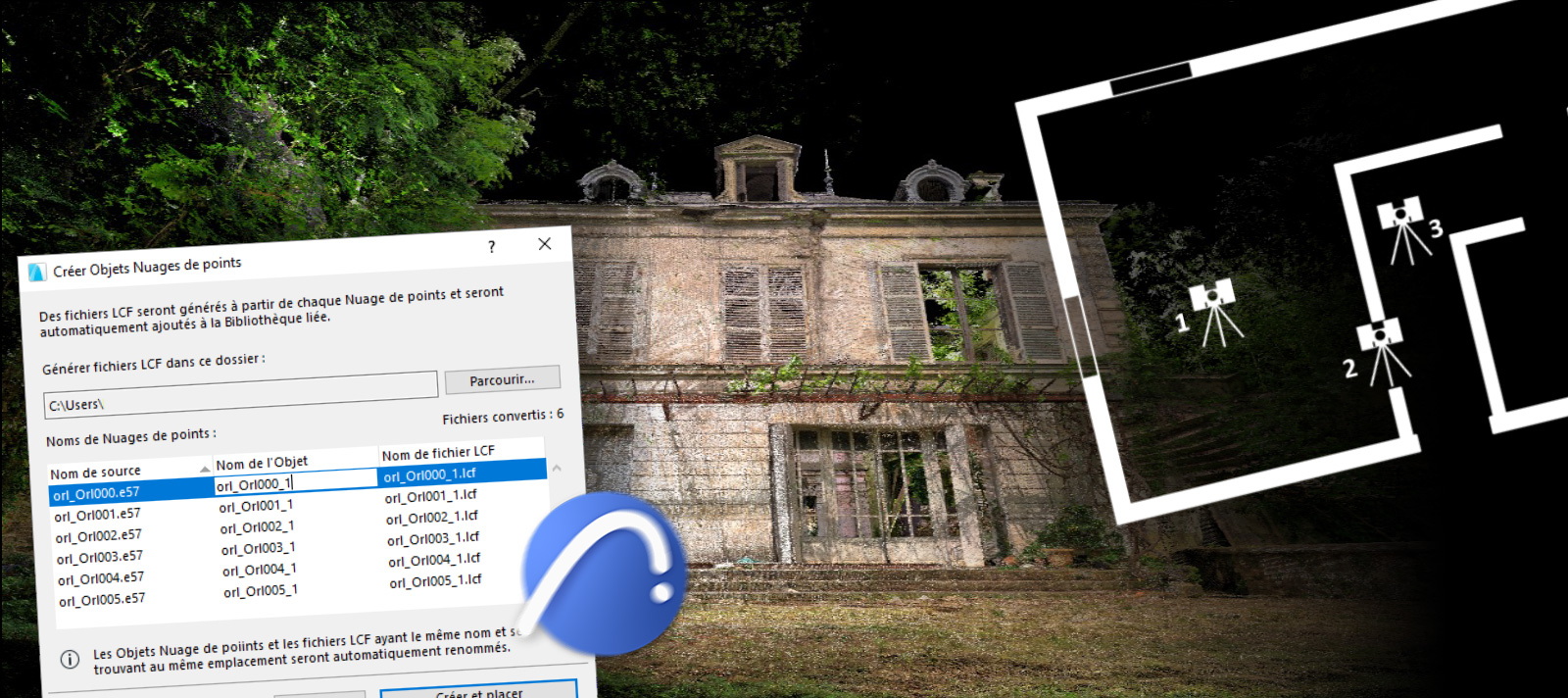
Végétation
La végétation importante et de manière générale, tous les objets pouvant masquer visuellement les zones d’intérêt à relever sont aussi problématiques. C’est un phénomène assez récurrent dans les relevés de l’état actuel, surtout sur des bâtiments anciens, d’autant plus lorsque ceux-ci sont laissés à l’abandon. Deux solutions s’offrent alors pour contourner cet obstacle : un défrichement ou bien la prise de mesures complémentaires par méthode traditionnelle (mètre ruban, laser mètre etc…) ou photogrammétrie aérienne (lorsque les obstacles causent un manque de recul pour capturer la toiture par exemple).
Une planification du relevé est primordiale puisque ce type d’obstacles peut considérablement augmenter le temps à passer sur site à cause du nombre de stations de scan supplémentaires à effectuer pour les contourner, garantir une exhaustivité des données capturées et obtenir un bon assemblage des nuages de points.
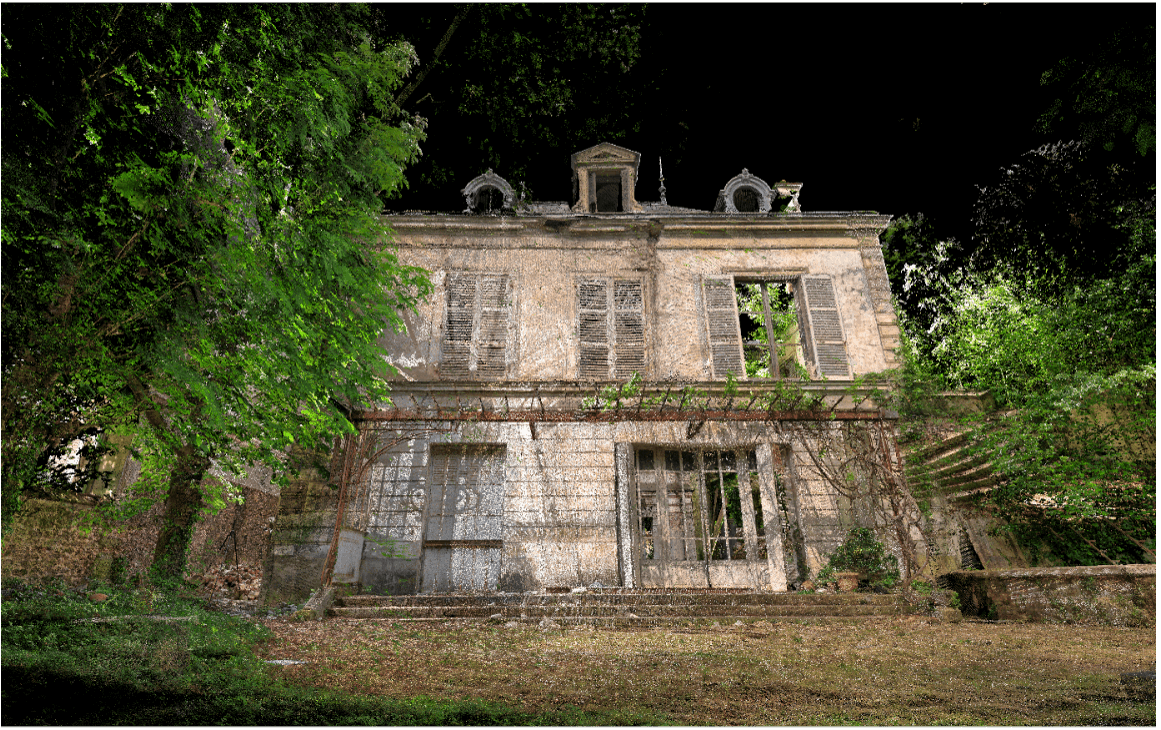
Figure 9 : Exemple d'un nuage de points avec végétation abondante
En tenant compte de toutes ces préconisations, le prestataire du relevé de scannérisation transmettra au modélisateur un fichier 3D au format .e57. Ce dernier représente le socle du futur fichier BIM. Cet élément sera le point de départ pour réaliser le travail de modélisation à l’aide d’un logiciel métier de type Archicad.
La modélisation de la maquette
L’import des nuages de points
La procédure
Depuis sa version 19, Archicad permet d’importer des nuages de points aux formats .xyz et .e57. Pour le faire, la procédure est simple : en passant par le menu « interopérabilité », il suffit de sélectionner le ou les fichiers de nuage de points et de choisir la méthode de placement.
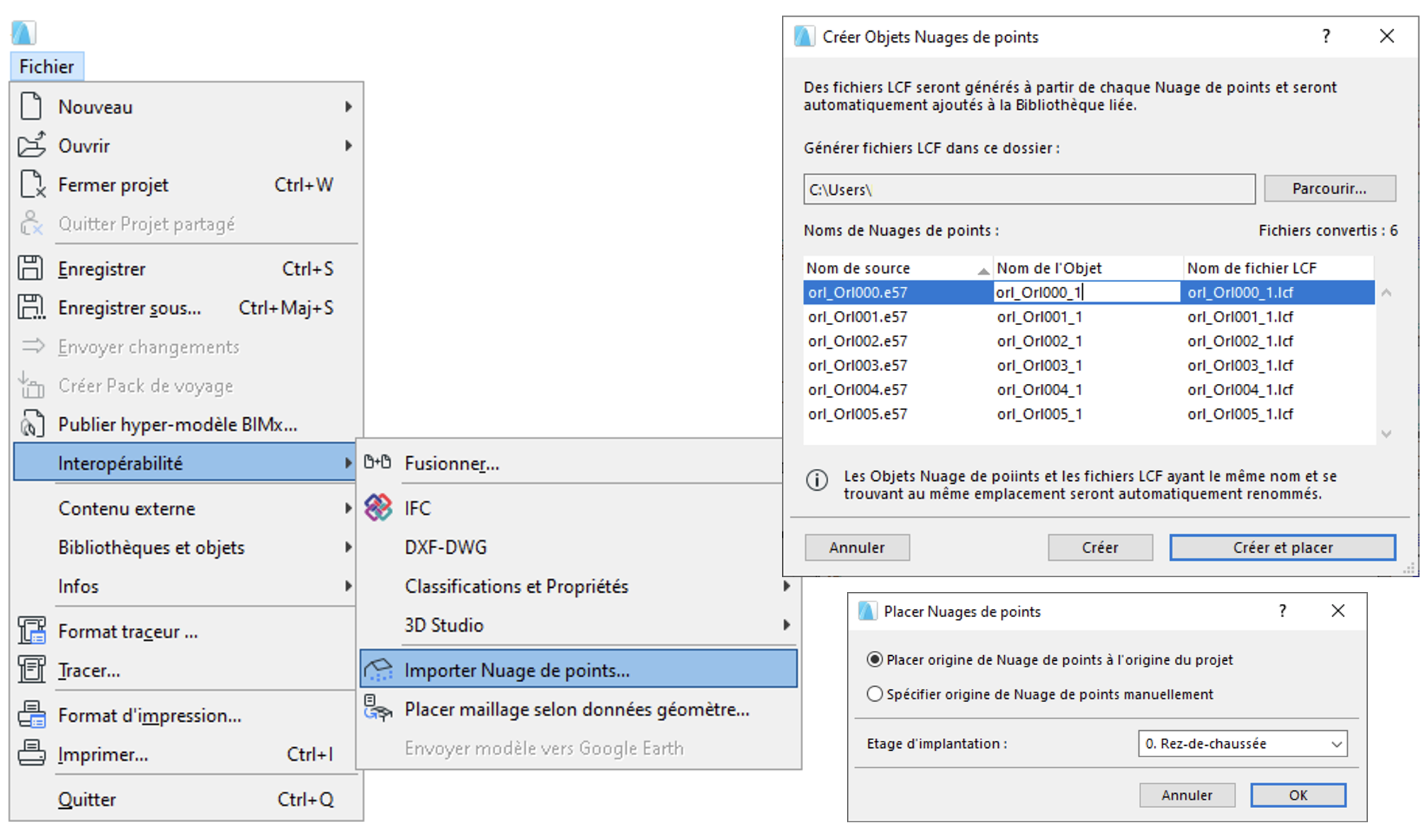
La procédure est simple mais elle doit être précédée d’une réflexion et d’une communication entre la personne qui fait le relevé au scanner 3D et la personne qui modélise d’après nuage de point.
Le choix de l’origine
Une fois importé dans Archicad, le fichier .e57 devient un objet .gsm. Comme tout objet de bibliothèque, il peut être placé puis déplacé librement. Il est cependant préférable d’importer directement le nuage à sa juste place, et ce pour deux raisons. La première est que les nuages sont lourds et donc fastidieux à déplacer, la seconde est que si le relevé comporte plusieurs fichier .e57, il y a un risque d’erreur et de décalage. Avant d’exporter le nuage, il faut donc répondre à deux questions. Combien de fichiers sont nécessaires pour optimiser le travail de modélisation, et quelle est la position idéale du nuage par rapport au projet, tant en planimétrie qu’en altimétrie. Une origine des nuages au centre du bâtiment et au niveau du sol du rez-de-chaussée permettra d’importer tous les nuages en « plaçant leur origine à l’origine du projet » et modéliser près de l’origine Archicad et en ayant le rez-de-chaussée à 0 comme prévu par le logiciel.
Le choix du nombre
Pour ce qui est du nombre de .e57 à prévoir, tout dépend bien sûr de la taille générale du nuage et de son échantillonnage, mais comme on ne modélise pas tout un bâtiment à la fois, un découpage par étage ou par « zone logique » parait adéquat. Le but est d’obtenir des fichiers .e57 avoisinant les 2 à 3Go, ce qui est une taille permettant un affichage rapide sans trop ralentir la machine.
Il suffit ensuite, une fois tous les nuages importés, de les répartir sur autant de calques, pour les afficher ou les masquer en fonction de l’avancement de la modélisation.
Travailler avec les nuages de points
Les atouts pour le calage
Une fois surmonté le problème du poids des fichiers, modéliser à partir de nuages de point s’avère efficace. Le principal avantage du nuage de point est d’être fiable, à condition d’avoir été bien capturé et d’avoir subi le post-traitement adéquat comme l’a expliqué Victor. Il permet donc de caler un bâtiment sans difficulté, même si celui-ci est très irrégulier, très vaste, ou qu’il présente des formes compliquées à relever de façon traditionnelle à cause de courbes par exemples. Un nuage de point peut donc remplacer des centaines de diagonales, des dizaines de croquis de détails et faire gagner des heures de calage. En revanche, pour un petit local de forme simple, ou même pour un bâtiment complet si celui-ci ne présente aucune difficulté de calage comme une barre HLM, un relevé traditionnel au laser-mètre sera tout aussi efficace. Il faut donc faire la part des choses et privilégier la méthode la plus pertinente. Par ailleurs, il est possible de combiner les deux techniques en réservant le scanner 3D aux espaces qui le justifient, comme les grands volumes, les pièces irrégulières ou décorées de moulures, lambris, corniches… Et en utilisant la méthode traditionnelle pour les petits espaces tels que les sanitaires, les placards…
Le filtrage de l’affichage
Afin d’améliorer les conditions de travail et la lisibilité du nuage de points, il faut « filtrer » l’affichage. Pour cela, les objets obtenus lors de l’import des fichier .e57 proposent une interface de réglage permettant de choisir la plage visible. Une fois cochée la case « Supplanter affichage en plan », il est possible de sélectionner la plage à afficher en plan (sorte de tranche de nuage dont on choisit les altimétries haute et basse).
N'afficher ni le plafond ni le sol d’une pièce permet de faire ressortir les murs à l’affichage, et s’y accrocher plus simplement, puisque chaque point du nuage est un point chaud auquel on peut s’attacher pour dessiner un mur ou une poutre. Là encore, c’est au modélisateur de juger du bon réglage pour optimiser son travail. Une fois les murs dessinés, on peut démonter la plage d’affichage pour le montrer que le plafond et ainsi modéliser les corniches. De la même manière, les coupes sur le nuage avec une étendue horizontale illimitée seront très longues à afficher, alors qu’une série de coupes de faible profondeur permettront là aussi de faire ressortir une section précise.
Les nuages quasiment indispensables
Comme dit précédemment, il est des bâtiments ou parties de bâtiment où le relevé au scanner 3D ne présente qu’un intérêt limité. Il en est d’autres où il est, sinon indispensable, au moins très efficace.
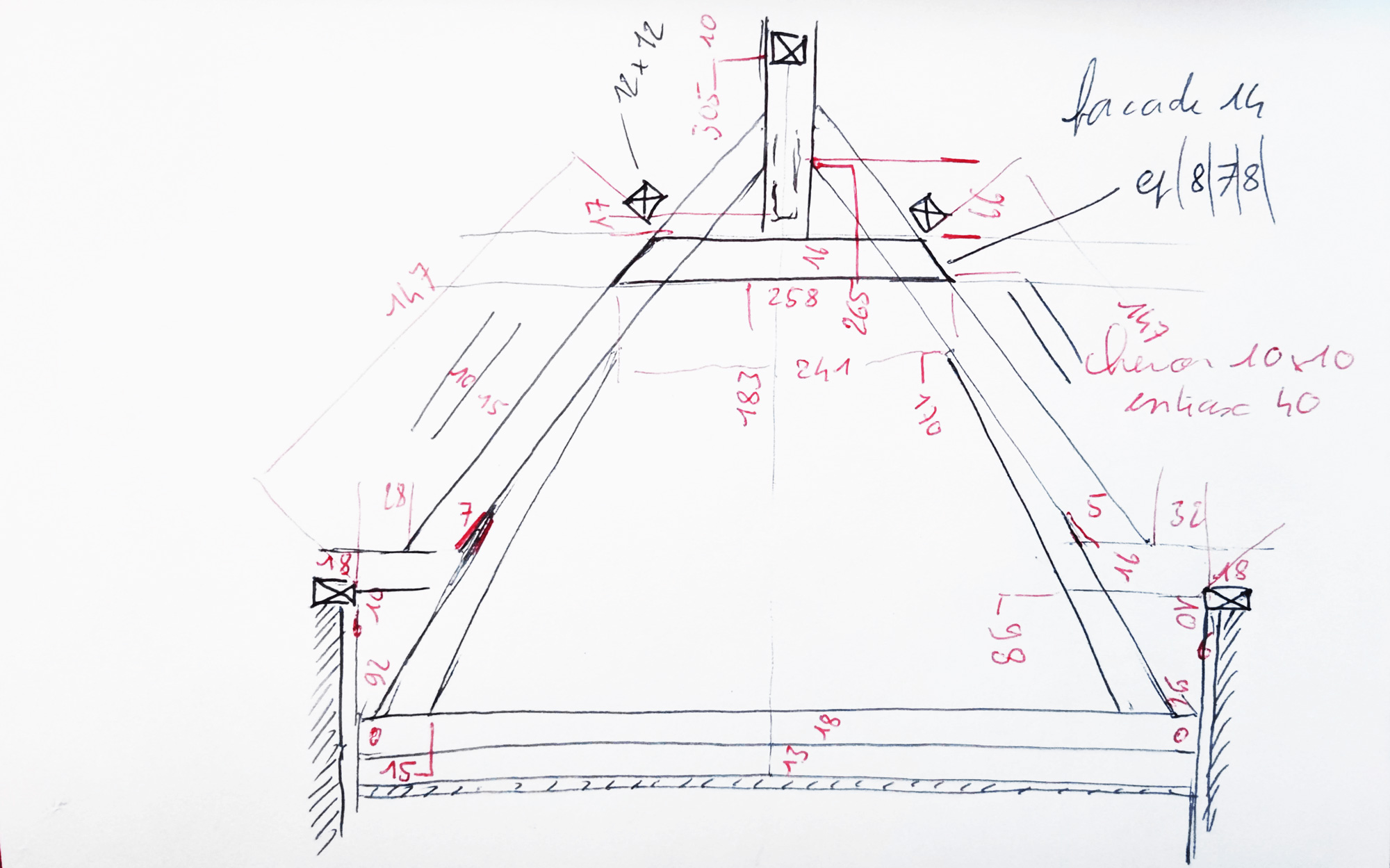
Les charpentes
Relever une charpente au laser-mètre est une tâche difficile et il en résulte des minutes souvent complexes et où certaines mesures sont forcément manquantes ou approximatives. Ces imperfections rendent la modélisation compliquée et forcément imparfaite. En plus d’être exact, le nuage de points par sa quasi-exhaustivité va permettre de repérer toutes les irrégularités de la charpente comme les variations d’écartements des chevrons, l’affaissement des pannes et autres. Ce n'est pas la partie la plus simple à modéliser du fait de la quantité d’informations, mais il peut en résulter une modélisation très précise qui sera un atout pour un projet de restauration ou d’aménagement de combles comme c’était le cas sur le projet de NEXTMED.

Les façades
L’autre cas de figure où un relevé au scanner 3D est un vrai plus pour la modélisation est le traitement de l’enveloppe extérieure, a fortiori si les façades présentent des modénatures ou des décrochements, et si les toitures ne sont pas des pans simples et peu nombreux. Une coupe perpendiculaire à la façade permettra de dessiner facilement le profil complexe de la poutre qui représentera une corniche. Une élévation parallèle à un garde-corps en fer forgé rendra facile le dessin de son motif. De même il est aisé de modéliser une toiture en créant les différents pans directement en 3D en s’accrochant sur les points du nuage, avant de les raccorder proprement « à coup de ciseaux » (sélection d’un pan de toiture puis ctrl+clic sur l’arrête de l’autre pan à connecter).
Les points faibles des nuages de points
La fatigue visuelle
Comme son nom l’indique, et comme son mode d’acquisition l’impose, le nuage de points est composé d’une multitude de points à quelques millimètres les uns des autres, et non de surfaces. Cela a pour effet de provoquer une fatigue visuelle plus importante que le travail sur Archicad traditionnel. A cela s’ajoute le fait de devoir zoomer et dézoomer plus fréquemment qu’à l’accoutumée pour voir les détails du nuage. Pour ne rien arranger, comme expliqué dans la première partie de cet article, le scanner permet d’acquérir un nuage colorisé en prenant des photos pour ensuite calculer la couleur de chaque point. Malheureusement, cette prise de photos augmente grandement le temps nécessaire pour chaque station du scanner. La personne faisant le relevé peut donc être amenée à gagner du temps en se privant de cette étape. Il en résultera un nuage en niveau de gris qui nécessitera encore plus de zooms pour réussir à identifier les détails et augmentera d’autant la fatigue visuelle.
Les angles morts
Il a été dit au début de l’article que l’un des avantages du relevé au scanner 3D était l’exhaustivité des informations géométriques captées. Cette affirmation est cependant à nuancer. En effet, en fonction de la topographie du site du relevé, l’acquisition peut être moins parfaite qu’espérée.
Le manque de recul induit par la présence de bâtiments voisins peut créer d’importants angles morts. Chaque saillie de la façade (balcons, corniches…) masque ce qui se trouve au-dessus. S’il s’agit d’un simple bandeau, il ne manquera que quelques centimètres de mur. En revanche, la corniche sommitale du bâtiment peut masquer une grande partie, voir la totalité de la toiture qui la surplombe.
De même une végétation trop dense et plantée trop près du bâtiment pour rendre un nuage de points tout simplement inexploitable.

Le scan 3D est la donnée d’entrée à la modélisation de l’existant. Cela peut se traduire par l’usage BIM suivant : Modélisation de l’existant avec l’acquisition de données. Concrètement, la mise en place de cet usage répond à quel(s) problématique(s) ? Est-il nécessaire pour tous les projets de rénovation / réhabilitation ?
La scannérisation de l’existant est produite notamment lorsque l’architecture et la structure sont spécifiques ou encore parce que la consultation des plans de l’état actuel est rendue impossible : pièces mal conservées ou détériorées ou perdues. La mise en place de cet usage BIM émane directement de la volonté de la Maitrise d’Ouvrage. Le résultat du scan 3D est alors transmis à la Maitrise d’Œuvre. La modélisation de l’existant à partir d’un nuage de points permet donc de délimiter et d’anticiper les éventuels vices présents dans l’ouvrage.
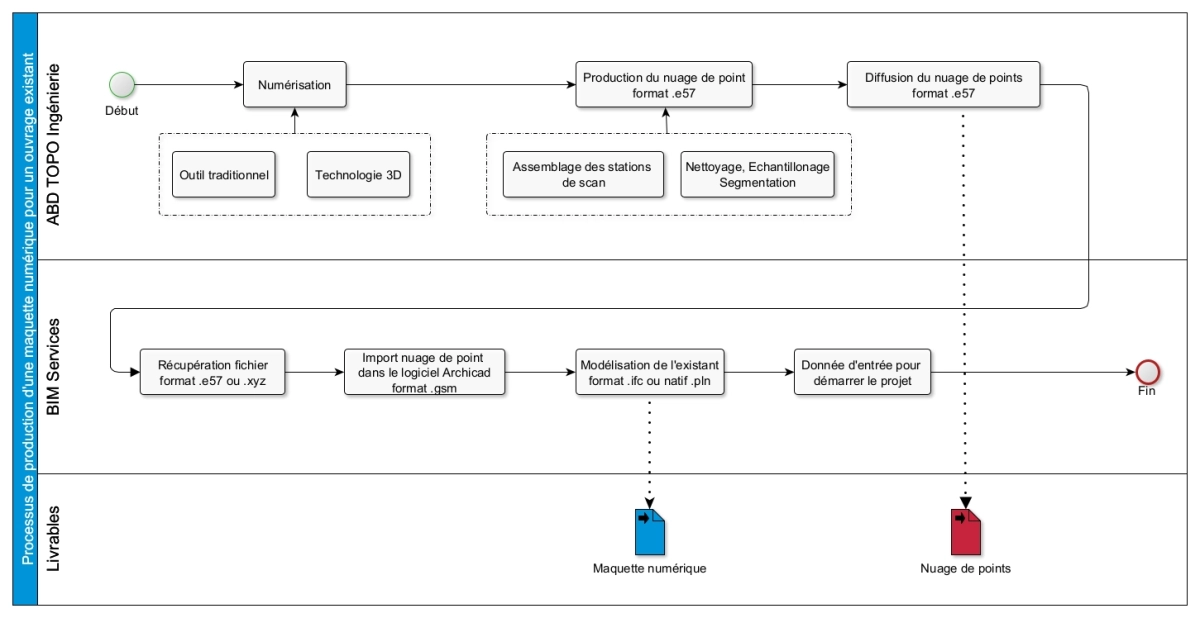
Processus de production d'une maquette numérique à partir d'un nuage de points au format BPMN
(cliquez pour zoomer)